
Robotické stroje hrají ve výrobě stále důležitější úlohu. Zvyšování produkce, nedostatek pracovních sil a snaha eliminovat lidské chyby si žádá automatizaci řady výrobních procesů. Jablonecká společnost ATEsystem, partner Matfyzu, aktuálně pracuje na vývoji nového programového systému pro průmyslového robota určeného pro 3D kontrolu výrobků. Jak takový nástroj vzniká a co všechno musí zvládnout?
V současnosti je ze strany průmyslových firem velká poptávka po robotických systémech schopných přesného kamerového navádění a orientace v prostoru (přesné uchopování, manipulace, pokládání objektů apod.). Robotický systém musí kromě schopnosti automatizované činnosti vykazovat také jistou míru univerzálnosti, flexibility a adaptability pro různé typy úloh. Komplexní robotický systém by měl ctít kybernetický přístup zahrnující zpětnovazební regulaci a měl by zastávat motorickou, senzorickou, i kognitivní funkci.
Asi není třeba připomínat, že slovo robot vnesli do slovníku nejen češtiny, ale prakticky všech světových jazyků bratři Čapkové. Jeho původ lze odvozovat od českého výrazu „robota“. V češtině bylo slovo robot z mluvnického hlediska neživotné (podle vzoru les, množné číslo lesy – roboty). Velmi často, zejména ve vědeckofantastické literatuře, se ovšem setkáme se skloňováním v životném rodu podle vzoru pán (množné číslo páni – roboti). Dle Ústavu pro jazyk český se slovo robot užívá jako životné, pokud označuje „stroj podobný člověku“. Ve významu průmyslových robotů jsou potom možné obě varianty skloňování, záleží tedy na mluvčím či pisateli, pro kterou se rozhodne.
Motorickou čili pohybovou funkci celého systému zajišťuje vlastní robotický systém (robot). Kognitivní funkci obstarávají senzorické jednotky (snímače, kamera apod.) v součinnosti s řídicím systémem. Informace sejmuté obrazovým snímačem následně putují k řídicímu systému, kde dochází ke kalibraci souřadných systémů robota a obrazového snímače, a ke zpracování obrazu metodami 2D, resp. 3D obrazové analýzy.
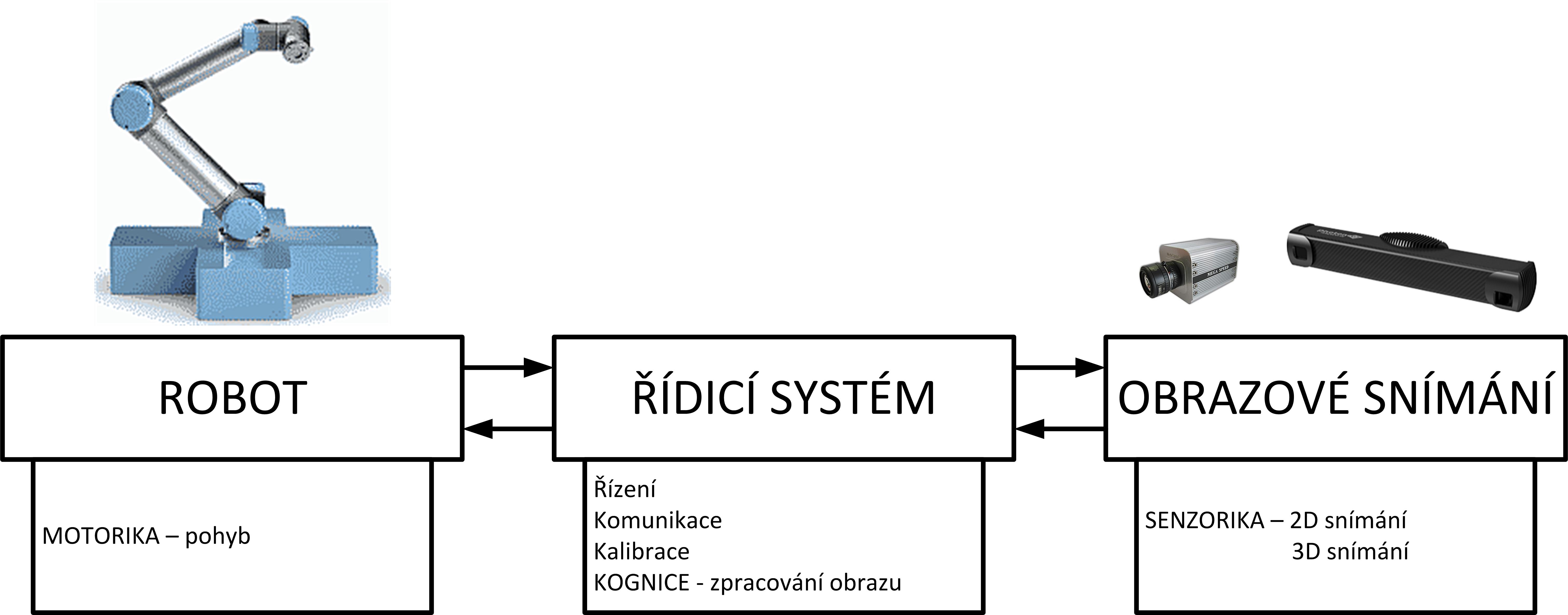 Blokové schéma komplexního robotického systému
Blokové schéma komplexního robotického systému
Jak oživit robota
Důležitým krokem při návrhu systému je volba vhodného robota pro konkrétní typy požadovaných úloh.
Kinematika zahrnuje studium robota z pohledu geometrie. Tím je myšleno jednak fyzické provedení jednotlivých částí – ramena spojená klouby – a rovněž trajektorie, po které se pohybuje sledovaný koncový bod (obecně nástroj, resp. jeho část určená bodem, jenž svým pohybem tvoří trajektorii). Kinematický řetězec je tak tvořen složením jednotlivých částí od základny robota až k jeho poslednímu článku – přírubě poslední osy, na kterou je nástroj připevněn. Smyslem rozboru kinematického řetězce je určení polohy.
Robot je na základě svého kinematického složení omezen na pohyb v operačním prostoru (zasahuje do něj kteroukoliv svojí pohybující se částí – např. kloubem, ramenem). Každý typ robota má zároveň specifický pracovní prostor, který je definovaný dosažitelností aktuálně používaného nástroje, resp. jeho referenčním bodem.
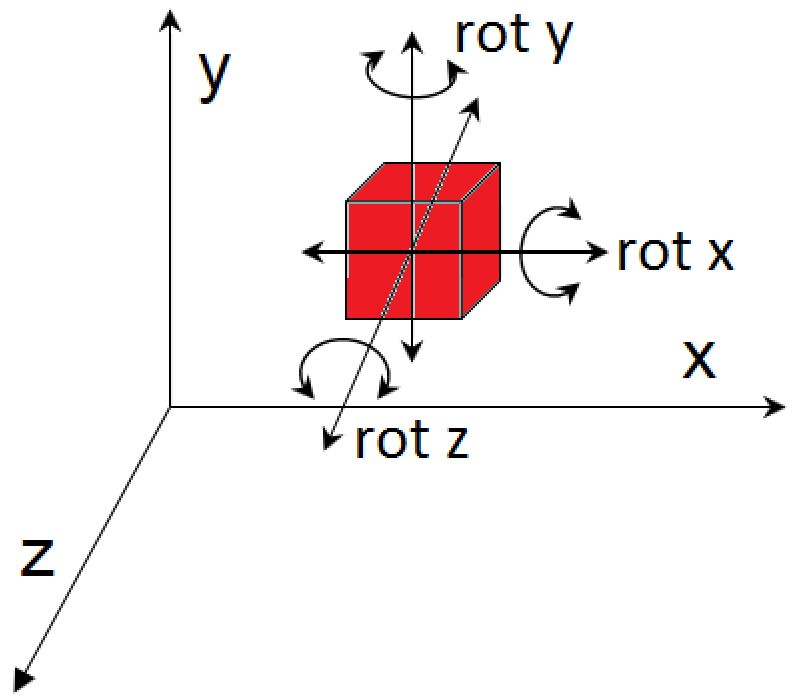 Obr. vlevo: Popis souřadnice šestiosého
robota
Obr. vlevo: Popis souřadnice šestiosého
robota
Prostor, v němž se robot pohybuje, je tedy určen fyzickým provedením robota a počtem stupňů volnosti, kdy počet kloubů, resp. pohonů je roven počtu stupňů volnosti. Čím je tento počet vyšší, tím větší jsou manipulační možnosti.
Robot musí být při práci přesný a měl by být schopen opakovaného pohybu po zadané trajektorii. Přesnost je vlastně rozdíl mezi požadovaným bodem, do kterého se má dostat efektor čili zařízení připojené na koncovou část robota, a bodem, do kterého se skutečně dostane. Celková přesnost se přitom snižuje s délkou ramen a je vyjádřena součtem maximálních odchylek v poloze a orientaci.
Při použití robota je velmi důležité definovat středový bod nástroje (TCP – z angl. Tool Center Point), a to přesným translačním a rotačním rozdílem mezi rámem příruby robota a špičkou koncového efektoru (např. dvouprstový uchopovač, svařovací nástroj apod.).
S přesnými pohyby robota úměrně souvisí rychlost polohování, kdy se zvětšující se rychlostí pohybu kloubů a ramen se úměrně snižuje přesnost během pohybu ramen. S vysokou rychlostí jsou patrnější projevy odvislé od tuhosti posuzované soustavy. Dynamika robota je také závislá na nesené zátěži. Větší zátěž klade vyšší nároky na řízení jednotlivých servomotorů. Řídicí systém robota musí mít pro adekvátní řízení k dispozici informaci o aktuální zátěži umístěné jak na přírubě posledního kloubu, tak o statické zátěži na rameni, resp. ose č. 4 (tato zátěž je tvořena do jisté míry pasivními prvky, jako jsou hadicová vedení, elektromagnetické vzduchové ventily apod.). Této zátěži jsou pak přizpůsobeny parametry v regulační struktuře každého pohonu tak, aby řízení s důrazem na polohu (natočení) bylo co nejpřesnější při zachování žádané rychlosti pohybů.
Kinematické úlohy
Pohyb robota se řeší pomocí kinematických úloh. U přímé kinematické úlohy je známa konfigurace manipulátoru (robota) a hledá se pozice a orientace chapadla (efektoru) v prostoru. Úlohu lze popsat nelineární transformací X = G(Θ), kde jsou hledány zobecněné souřadnice X pro dané hodnoty kloubových souřadnic Θ. Koncová poloha efektoru je určena pomocí údajů o natočení jednotlivých servomotorů (údaje z enkoderů těchto pohonů).
V případě inverzní kinematické úlohy je dána pozice a orientace efektoru a hledá se rotace kloubů – jejich hodnoty, které musí být nastaveny, aby efektor robota byl v požadované pozici. Úloha je popsána inverzní nelineární transformací Θ = G-1(X), kde jsou hledány kloubové souřadnice Θ pro dané hodnoty zobecněných souřadnic X. Tato úloha je v robotických aplikacích nejčastější.
V prvním typu úlohy je řešení relativně jednoduché a je dáno násobením matic, popisujících kinematické dvojice napříč celým řetězcem složení robota. Úloha má jednoznačné řešení. Kdežto u inverzně postavené úlohy musí zařízení (kontrolér robota) simultánně řešit soubor nelineárních algebraických rovnic (uplatňují se zde goniometrické funkce). Navíc řešení nemusí být jednoznačné, případně úloha může být neřešitelná (robot nelze napolohovat do požadované pozice).
Tuto problematiku vyjadřuje pojem „singulárních bodů“. Obecně jde o bod nespojitosti na jinak spojitém intervalu. Z pohledu kinematiky je tím myšlena oblast, pro kterou je inverzní úloha neřešitelná. V singulárních oblastech ztrácí robot jeden nebo více stupňů volnosti v kartézském souřadnicovém systému. Singulární oblasti jsou dané mechanickou konstrukcí každého robota a prakticky to znamená omezení lineárních pohybů v určitých směrech v dané oblasti. Z pohledu pozicování se lze singulárním bodům vyhnout vhodnou volbou geometrického rozvržení pracoviště, kdy efektor pracuje při vhodné konfiguraci os (ne v přímém směru, kdy jsou osy zarovnány), případně použitím upraveného nástroje, a pokud to není nutné, tak přesunutím z jedné pozice do druhé pomocí pohybového příkazu, který umožní robotovi angulární pohyb v místě efektoru (místo translačního).
V příštím díle se blíže zaměříme na řízení pohybu robota a problematiku kalibrace systému s obrazovým snímačem.
Společnost ATEsystem Jablonec poskytuje služby v oblasti testování komponent pro všechna odvětví průmyslové výroby. Specializuje se zejména na dodávky systémů pro optickou kontrolu a strojové vidění. Konkrétně jde o systémy pro vizuální inspekci, které na základě počítačem zpracované obrazové informace z kamery vyhodnocují bezvadnost výrobků v rámci výrobního procesu (např. správný tvar, rozměry, barvu, popisy, kompletnost a správnost montáže). Součástí nabízených řešení je také dodávka automatizovaných systémů určených pro měření, záznam, vyhodnocení a zobrazení fyzikálních veličin.